












Rescue Tripods ‘Falling Over’
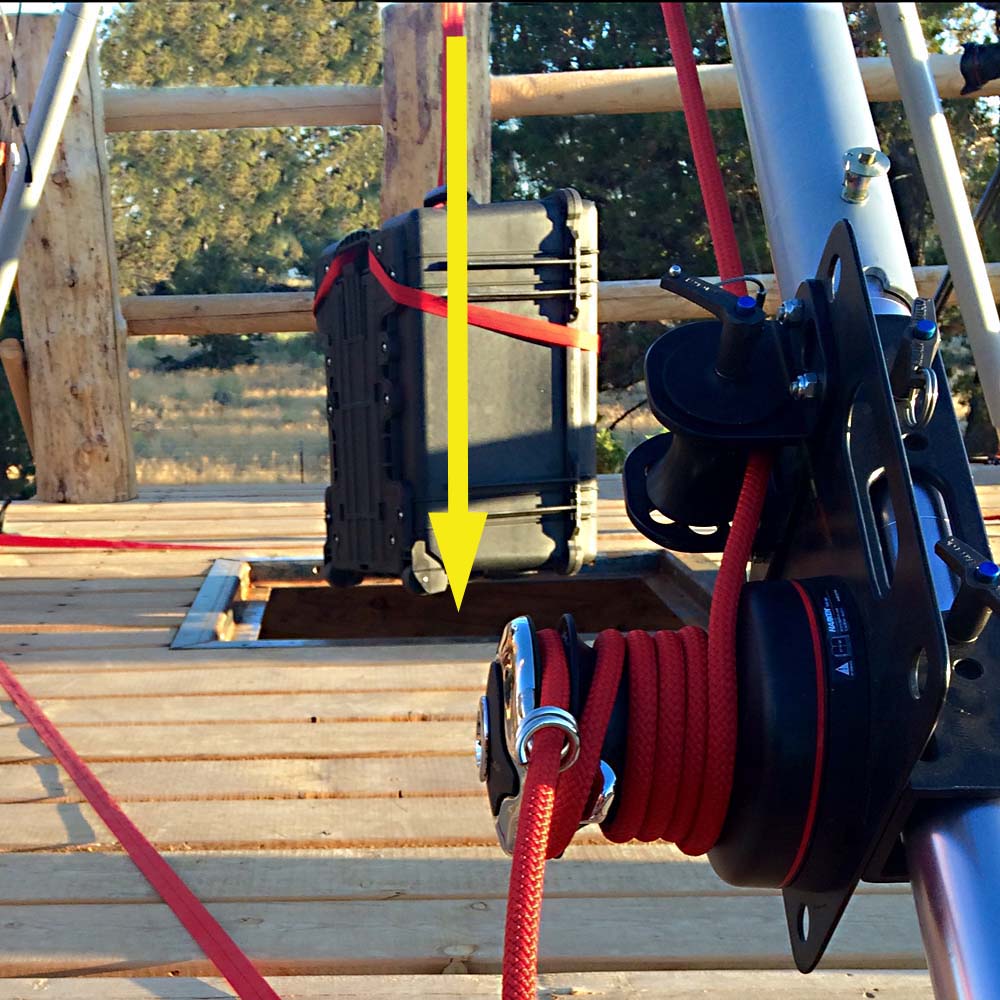
Rescue tripods ‘falling over’.
Natural, improvised, and purpose built high directionals are used to manage loads over edges and through openings. They can make otherwise impossible tasks possible.
There are now many proprietary solutions with almost limitless configurations that are being used by rope technicians for access, standby rescue, technical rescue, and load management. High directionals take many forms but the most common is the tripod. Tripods are deceptive because they can be free standing and there is the temptation to assume that if it’s standing up it should work fine.
Unfortunately, there seems to be an increase in the number of incidents where these devices are ‘falling over’ in situations supporting live loads. These near misses are rarely reported but informal discussions lead me to believe that this is happening at least once every six months somewhere in the world. This rate of incident is unacceptable.
These incidents are never the result of equipment failure. High directionals fall over because people fail to understand and anticipate the forces acting on the system.
Background
Confined space access/rescue tripods
Tripods are often used for standby rescue with confined space operations where a symmetrical unit is setup over the top of a hole. One of the legs will often incorporate a hauling mechanism attached to a line which runs up to a pulley at the tripod head and then down the hole to an operator. The head is normally hinged so the feet are hobbled to prevent them spreading. In this configuration everything is stable and there is no requirement for guy lines or anchors.
For confined space rescue, management of the load is critical. The tripod needs to be high enough to get a person suspended vertically in a harness up and out of the hole and thus tripods are more than 1.8m high.
Technical rescue tripods
In technical rope rescue applications, a load normally needs to be managed outside the footprint of the tripod. The footprint is an imaginary perimeter line that can be drawn connecting all of the feet. The load may start at the base of a cliff and then, once at the top, be moved inboard and placed on safe ground.
The term “resultant” has become a part of the language of rescue rigging. The “resultant” refers to another imaginary line that represents the net force applied to the tripod as a result of all external connections. Technical rescue high directionals typically have a rope coming up from the load, through a pulley at the head, and then back to a haul team. The resultant would then be along a line which bisects the incoming and outgoing ropes. To achieve stability this “resultant” should point to a spot on the ground well within the footprint of the high directional.

Instability
Confined space and tech rescue high directionals are stable if the resultant remains within the footprint. The biggest challenge is to visualise the resultant for the entire operation. It may be well defined for 90% of the task but the other 10% may include:
- Planned movement of the high directional: “luffing” the frame in and out or “slewing” the frame sideways.
- Movement of the load away from the main operational line through tension from an external rope.
- Direct human influence on the path of the load, particularly during edge transitions.
- Some other mid-operation change in an attempt to alter the path of the load.
It is fine to have a resultant outside the footprint however this must be anticipated and other components must be introduced to oppose this instability. This may involve a combination of tension and compression elements.
Rescue load
The management of a “standard rescue load” has become too great a focus in rope based technical rescue. The key benefit of a high directional is managing friction. Any time a rope turns 90 degrees over a rock or concrete edge, we have an effective system of mechanical disadvantage of approximately 1:2. If we are attempting to raise a “standard rescue load” of 272kg/600lbs, then this unmanaged edge friction dictates a hauling force of twice the load. Not only does this mean hard work, but also it shifts us into the realm of forces in excess of the Safe Working Load of much of our equipment.
If we acknowledge that high directionals for technical rope rescue have the primary task of reducing edge friction then a high directional need only be high enough to support a pulley just above an edge. In many cases this may simply be high efficiency, spinning edge rollers. Teams internationally have long trained in managing loads at cliff edges without tripods. It requires practice and a few people, but it is often the only option in wilderness operations.
For technical rope rescue, high directionals are for managing edge friction. Any benefit associated with moving a load over an edge is secondary.
The height of the ‘high directional’
If the edge is sudden, then a high efficiency edge roller is sufficient. As the edge becomes more rounded, the position and height of the directional needs more careful consideration. More height means more equipment, more weight, and more effort to achieve stability.
Operators have become focused on floating an attendant plus litter ‘rescue load’ up, in, and placed down on stable ground. This operation typically requires a multipod which supports a pulley at least 1.8m above the ground.
Perhaps it is time to question the reasoning behind defaulting to inclusion of an attendant in every operation. The traditional justifications for including a litter attendant are managing obstructions and life saving attention. Obstructions can be managed equally well by an operator on a separate rope. Specific medical concerns are valid, however these should be assessed for each operation. Opportunities for mid-haul treatments like CPR or defibrillation just may not be realistic.
Even if conditions dictate inclusion of an attendant with the load then the benefits of removing the attendant for edge transitions cannot be ignored.
If the attendant can be removed then a short (1m) monopod can provide the best of many outcomes:
- It will be light and portable.
- It will be easy to stabilise.
- It will deal with a significant amount of edge friction.
- It will be high enough to move a horizontal litter in board easily.
Careful consideration of the forces acting on a monopod system are required and a minimum of three guy lines are needed before it will stand up. This means operators will have to think much more than they would for a free standing tripod. Given the rate that tripods appear to be falling over, this requirement for extra thought is not a bad thing. More rope will be required to stabilise a monopod than a tripod but there are new, lightweight cordage options available that enable 50m of 6mm, 19kN cord to be carried in a small bag.
A short monopod will also force operators to be more efficient with every aspect of the rigging, particularly the litter bridle.
Conclusion
Many of the systems used for rope based technical rescue have become heavy, unstable, and have lost focus on the key requirements of the task at hand.
The main function of a high directional is to manage edge friction. The distraction of managing a tall, heavy load over an edge has led many to rely on unnecessarily tall high directionals which are falling over far too often. The key considerations of weight, portability, function, and stability can still be achieved with short monopods. It’s just that we may have to reverse a trend and put a bit more effort into understanding, rather than going for an “NFPA G-rated”, one-size fits all approach to technical rope rescue.
© Richard Delaney, RopeLab, 2014
Related Posts


About The Author
Richard Delaney
Richard Delaney has worked professionally with ropes since 1992 as a multi-pitch rock-climbing instructor, technical rescue instructor and rope access technician. Understanding and teaching the Physics of Rigging is a core passion of Richard’s, one based on his experience, and his prior professional life as a qualified engineer.