












Powered Winches and Tripods
We are seeing an interesting collision of techniques:
- Standard triangular pyramid tripods used for confined space rescue,
- Asymmetrical multi-pods used for technical rope rescue and rope access, and
- Powered winches.

Confined space operators have long been using symmetrical tripods with frame mounted manual winches. These are normally set up over a hole and have a hand operated winch mounted on one of the legs. These tripods are free standing and require no anchoring.
Technical rescue and rope access operators regularly use asymmetrical multi-pods for use in many possible configurations to manage edge friction. Each configuration has varying anchor requirements and these are mostly determined by careful evaluation of the forces acting on each part of the system. These systems have traditionally been operated without winches.
There is now a range of winches suitable for use in technical rescue operations and these winches can be mounted in several possible places including the following:
- Directly attached to and controlled by the operator
- Positioned at the system anchor and thus taking the place of a traditional hauling team
- Mounted directly on a leg of the multi-pod
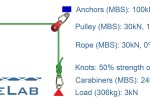
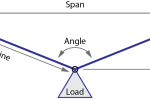
It is the last of these options that is of concern. Operators are now have a reasonable grasp of the forces of tension and compression in these multi-pod based systems. However, it often comes down to bisecting the angle between the operational line over the edge and the line running back to the hauling team to determine the ‘resultant’ force on the frame. So long as this resultant is within the footprint of the multi-pod, the system is stable.
Few operators realise how much this changes if a frame mounted winch replaces the hauling team. The winch now becomes a part of the frame and thus it would make no difference whether it was mounted down low at one of the feet or right up at the head. The significance of this is that the only external forces acting on the frame are the downwards operational line and the upwards contact pressure of the feet.
The confined space workers know and want this, as the tripod always sits over the hole. Rope access and tech rescue operators, on the other hand, rarely have the operational line within the footprint.
Any rope access and tech rescue operators considering using frame mounted winches must be aware of this fundamental change in their evaluation of resultants.
Simple rule: If the winch is mounted on the frame, the resultant is the operational line. If this line is outside the footprint then the frame needs to be guyed to counter this potential tipping force.
© Richard Delaney, RopeLab, 2014.
Eduardo José Slomp Aguiar has been kind enough to translate this article into Portuguese. We are grateful for his input. The Portuguese translation can be found here.
Related Posts


About The Author
Richard Delaney
Richard Delaney has worked professionally with ropes since 1992 as a multi-pitch rock-climbing instructor, technical rescue instructor and rope access technician. Understanding and teaching the Physics of Rigging is a core passion of Richard’s, one based on his experience, and his prior professional life as a qualified engineer.
Add a Comment
You must be logged in to post a comment.
This post is accessible by non-members as is other content in ‘News’ section of this site.